



学院霍冠英教授科研团队在不利水体下高精度光学定位技术与设备方面取得系列研究成果
海洋工程是国家现代综合性和战略性产业,《国家重大科技基础设施建设中长期规划(2012—2030年)》指出,要大力发展海上作业保障装备及其关键系统。面向远岸大水深海洋重大工程建设少人化、无人化、智能化作业需求,亟待开展复杂海洋工程环境高精度定位技术研究。由于海洋工程作业环境复杂,水体浑浊度高,如何提高不利水体下光学定位的精度是亟待解决的难题。
为此,学院霍冠英教授团队围绕国家重大需求、行业智能化前沿,在偏振成像去散射机理、物理驱动的水下偏振图像去散射、双目偏振与激光测距融合的水下高精度光学定位设备研发等方面取得系列创新成果。
1. 系统分析了偏振成像去散射的理论基础与实现路径
自然水体中存在的悬浮粒子对入射光线具有散射与吸收作用,不仅造成目标光场能量的严重衰减,还使得背景杂散光混入成像系统,最终导致图像对比度与有效传输距离的显著下降。偏振成像技术利用光的偏振特性,有效抑制散射噪声,提升成像质量。从物理模型建立、成像系统构建、信息处理算法等多个维度,深入探讨了偏振去散射技术的理论基础与实现途径;分析了偏振成像的面临的主要挑战,包括成像分辨率与速度的平衡、复杂环境下偏振特征的稳定性以及多维度光学信息的融合处理等关键问题;通过对现有技术路线的深入剖析,为偏振成像技术的未来发展指明了方向,特别是强调了物理驱动的智能光学成像技术,为实现更高精度、更强鲁棒性的光学成像提供了重要理论支撑与实践参考。
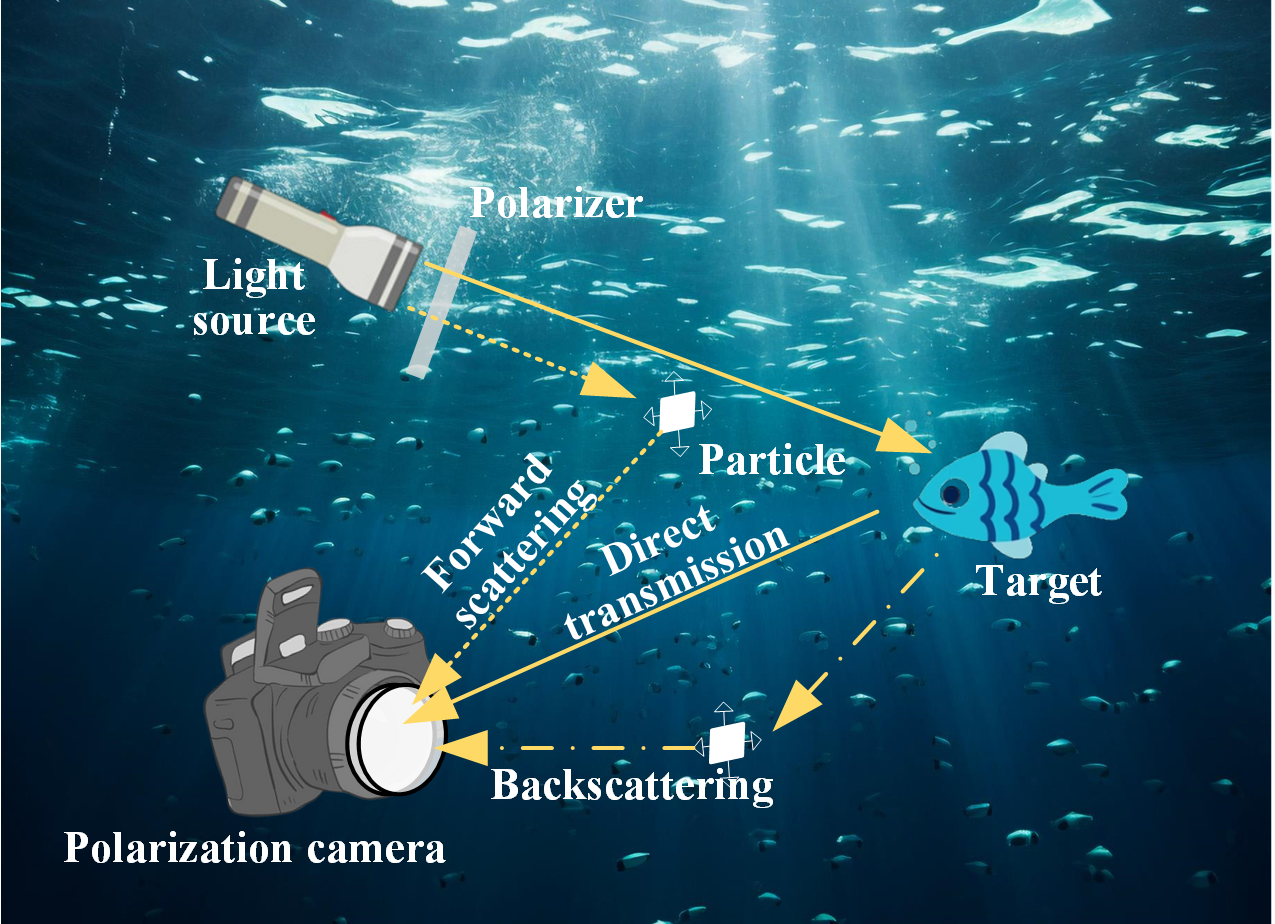
图1 水下偏振成像物理模型
2. 提出低秩建模与非线性复合透射率耦合的水下偏振图像去散射模型
针对高浑浊水体的强散射造成的图像质量急剧下降,提出低秩建模与非线性复合透射率耦合的水下偏振图像重建模型。通过低秩分解将水下光强信号分解为低秩背景散射光和稀疏目标信息光,并引入动态衰减策略自适应调整正则化参数,提升分解的鲁棒性;利用背景散射光的空间冗余性和目标光信号的稀疏性,通过交替方向乘子法实现有效分离;基于偏振度与透射率的物理关联,构建非线性复合透射率模型,结合各向同性强度衰减与偏振调制,更符合水下光学传输特性。实验结果表明,提出的新方法不仅显著提高了水下偏振成像质量,将UIQM指标从0.285提升至1.248,AG指标从2.212提升至7.939,还能够成功应用于图像去雾任务,验证了其跨域泛化能力,为复杂环境下高质量图像重建提供了新思路。

图2 低秩分解和非线性复合偏振透射率协同的水下图像去散射框架
3. 研发了双目偏振视觉与激光测距融合的水下高精度光学定位设备
为提高不利水体下光学定位的精度,提出并研发了双目偏振视觉与激光测距融合的水下高精度定位方法;同时,考虑不利水体衰减带来的作用距离降低与水体散射带来成像质量退化等影响,联合中国船舶集团有限公司第七一七研究所研发了主、被动联合的水下光学合作靶标。研发的设备经权威机构检测,在透明度为0.7m水体中探测距离可达3m,定位精度可达1mm。设备在国家级重大工程——广州鱼珠隧道沉管对接施工中得到了应用示范。鱼珠隧道位于广州城市发展的核心区域,连接海珠区、天河区和黄埔区,采用沉管隧道方式下穿珠江。在沉管对接过程中,团队将光学定位设备安装于固定沉管(E1管节)一端,合作靶标安装于待对接沉管(E2管节)一端,当E2管节经北斗、声呐等辅助手段引导至E1管节约3–5米范围内时,启动光学定位设备与合作靶标,进入高精度光学定位阶段,利用自研软件实现图像采集、合作靶标光源控制、激光测距、图像去散射和光学定位功能。针对珠江流域高浊度水体,在图像去散射的基础上,通过提取靶标光斑实现mm级的全自动水下光学定位,实现了沉管的精准对接。
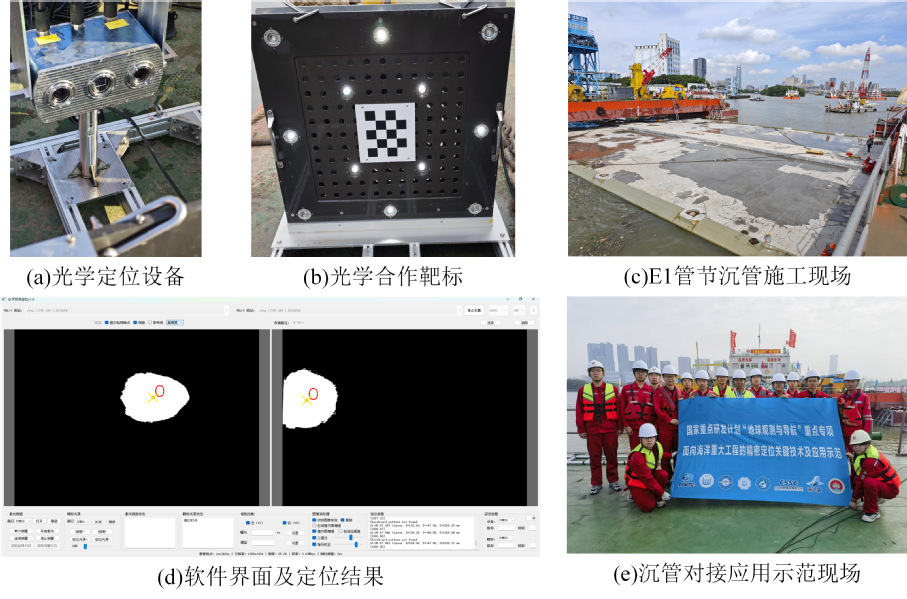
图3 水下高精度光学定位设备应用于鱼珠隧道沉管对接施工
上述研究工作主要由我校信息科学与工程学院霍冠英教授(通讯作者)、2024级博士生孔伟丰和信息科学与工程学院刘艳副教授等共同完成,得到了国家重点研发计划(2023YFB3907203)、国家自然科学基金“叶企孙”联合基金(U2441254)资助,系列成果发表在光学领域与计算成像权威期刊《Optics and Lasers in Engineering》、《Optics and Laser Technology》和《IEEE Transactions on Computational Imaging》上,成果已成功应用于鱼珠隧道沉管对等重大工程项目,经济、社会效益显著,推广应用前景广阔。
代表性文献成果
[1] Kong W, Huo G, Application Research of Polarization Imaging Technology in Inhomogeneous Media/Material [J]. Optics and Lasers in Engineering, 2025, 194: 109113.
[2] Kong W, Huo G, Peng C, at al. Low-Rank Decomposition and Polarization-Driven Transmittance Synergy for Underwater Descattering with Cross-Domain Generalization[J]. IEEE Transactions on Computational Imaging, 2025.
[3] Kong W, Tan Z, Cheng L, et al. Staircase Recognition and Location Based on Polarization Vision [J] Optics and Lasers in Engineering, 2025, 195: 109309.
[4] Liu Y, Yu B, Sheng M, et al. MKIGEV: Collaborative Integration of Mamba Feature Extraction and KAN Cost Aggregation for Underwater Stereo Matching[J]. Optics and Laser Technology, 2025, 192: 113868.