立体视觉的ROV 水下探测机器人系统
项目名称:立体视觉的ROV 水下探测机器人系统
成 果 形 式 :专利技术、技术产品、系统成套、科研奖励
成果完成人:马云鹏
成果简介:
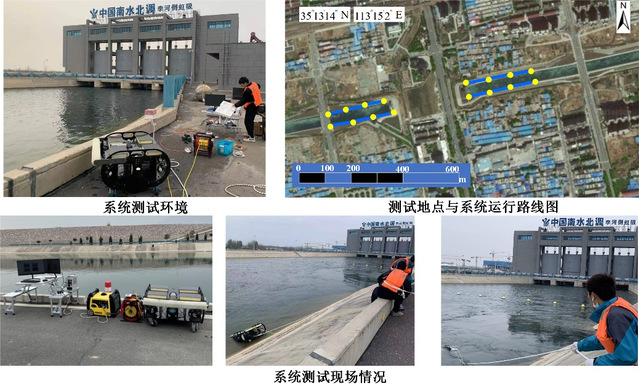
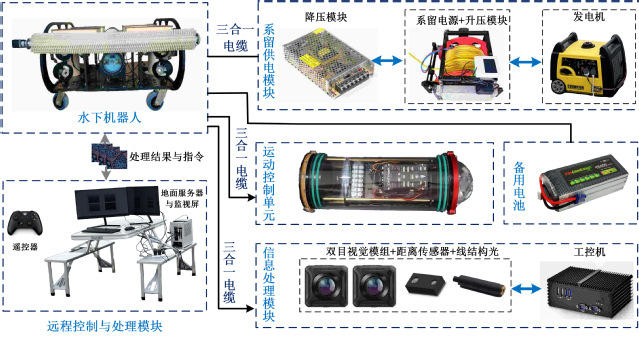
堤坝等水下构筑物的安全监测与维护是水利工程领域的重大挑战。传统的人工巡检方式,受限于潜水员的体能、视野范围以及水下环境的恶劣条件,不仅效率低下,难以实现对水下构筑物的全面、深入检查,更无法触及深 水区域及复杂地形,导致堤坝表面的微小缺陷往往被忽视,为水利工程的安全运行埋下了隐患。为此,本 成果依托国家重点研发计划项目,针对水下三维信息感知、堤坝表面缺陷检测与定量分析等难点问题,研 发了水下智能巡检机器人。系统采用独特的三舱体设计,确保了机器人在复杂水体环境中的稳定上浮、下 潜及灵活运动,还大大提升了其在水下的作业效率与稳定性。机器人前面搭载了滚刷,可对水下构筑物表 面的青苔等进行清除,同时,机器人搭载了先进的双目立体相机传感器,通过采集高清、立体的水下图像, 实现了对堤坝等水下构筑物表观状态的精准检测与定量分析,为堤坝的安全评估与维护提供了科学、可 靠的数据支持。该机器人目前已经在南水北调中线进行了多次应用,得到了水利部调水局、南水北调中线 建管局的高度认可。