



北斗、惯导与视觉协同的地下管道智能巡检测绘机器人
项目名称:北斗、惯导与视觉协同的地下管道智能巡检测绘机器人
成果形式 :专利技术、技术产品、系统成套、科研奖励
成果完成人:马云鹏
成果简介:
地下电缆管道工程,作为现代城市电力网络的隐形血脉,其隐蔽性特质对工程质量与安 全运维提出了极高要求。验收阶段的质量把关,直接关联到电缆管道的长期稳定运行与城市的用电安全。 然而,地下空间的封闭性、复杂性给巡检与三维测绘工作带来了前所未有的挑战,为此,本成果依托国网 江苏省电力有限公司需求,研发了一种地下管道巡检与测绘机器人系统。通过设计管道机器人六臂爬行 式新型动力与形态结构,装配自动收放线轮装置与机械臂异物清除装置,并采用电力载波与网络通信的 混合数据传输方式,实现机器人在地下管道内的不断电、长距离探测作业与稳定信号传输,利用北斗高精 度定位模块、惯导、立体相机、编码轮等多源传感器间的优势互补,完成管道内部缺陷自动识别、异物定位 与抓取清除、以及三维测绘等功能。该产品已经在江苏省盐城市110kv 开元、佳明、新南等地下电缆管道 进行了应用,解决了多项痛点问题,巡检距离可达200m,满足不同管径或涉水等复杂多样电缆管道中的 长距离安全巡检作业需求,具有长续航、动力足、智能化的优势,切实解决了无卫星信号环境下的管道机 器人精准定位与测绘难题、以及狭小电缆管道中的疏通清障难题,为地下电缆管道巡检提供了一种操作 简单、安全灵活、工作效率高的新型智能化技术手段。
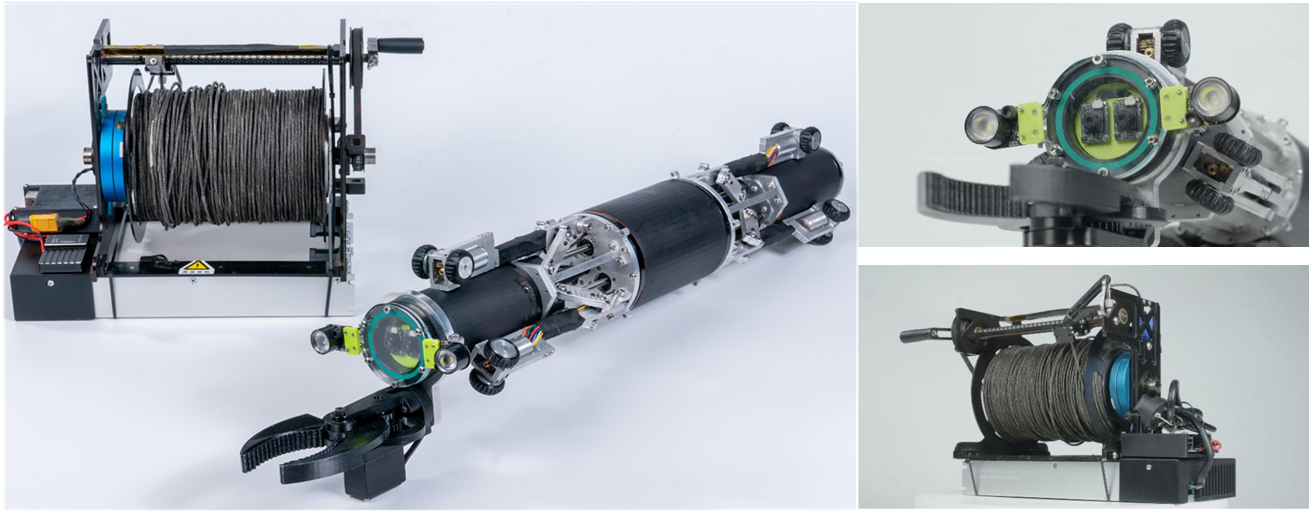
地下管道巡检与测绘机器人
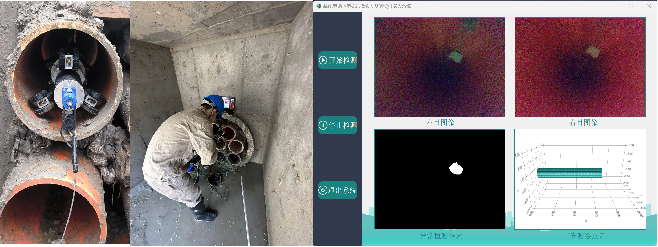
现场应用